
1 Introduction
Diamond film has excellent performance and is an ideal coating for tool and mold materials. With the development of chemical vapor deposition (CVD) technology, the production cost of diamond film synthesized by this technology is significantly reduced, and it has been commercialized. Prospects [1]. However, the orientation, grain size and thickness of the surface of conventional diamond films are not uniform, and the surface roughness is also high, generally up to several micrometers, which affects many applications of diamond films. For example, diamond film coated tools and molds require a high surface finish, so diamond post-processing techniques (including polishing, leveling, metallization, etc.) are becoming more and more important. For the polishing of diamond film, the polishing problem of diamond film has become a key technology for expanding the application of diamond film due to its high hardness, stable chemical properties, thin thickness, and diamond film peeling during polishing.
In recent years, many scholars at home and abroad have proposed a number of new diamond film polishing methods through a large number of research and experiments, including chemical-assisted mechanical polishing, laser polishing, thermochemical polishing, ion beam polishing, electric spark polishing, etc. [2- 6]. These methods basically utilize the diffusion and evaporation of carbon atoms and chemical reactions, micro-cutting, graphitization of the surface, etc. to achieve polishing of the diamond film. Since the "magnetic brush" of magnetic grinding is flexible, it is very suitable for the polishing of the inner hole [7]. In this paper, a new method of polishing the inner hole diamond film by magnetic grinding is proposed, and the surface morphology, quality and performance of the film before and after polishing are studied. The characteristics and effects of the magnetically ground diamond film are discussed.
2. Test method
2.1 Principle of magnetic grinding
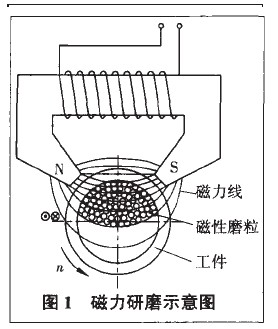
As shown in Figure 1, a magnetic field is formed between the magnetic poles N and S. If the magnetic field is filled with an abrasive that has both magnetic and cutting ability, the abrasive will be closely and regularly arranged along the magnetic lines of force to form a brush-like so-called "magnetic brush", which will exert a certain pressure on the surface of the workpiece. . When the workpiece is placed in this magnetic field, the "magnetic brush" generates a magnetic force and acts on the surface of the workpiece in the form of pressure. When the workpiece performs the rotary motion and the axial motion, the relative motion between the magnetic abrasive brush and the workpiece occurs, thereby grinding the inner bore surface of the workpiece. During the magnetic grinding process, the single abrasive particles, under the combined action of the magnetic field force, the magnetic field holding force and the tangential friction force, keep the abrasive particles stably in the polishing area, and achieve the grinding and polishing of the workpiece surface. At the same time, due to the magnetic field force, the abrasive particles will automatically collect into the polishing area and collect on the inner surface of the workpiece to be polished to form a complete polishing cycle.
2.2 Magnetic abrasive grains
The magnetic abrasive is made of alumina (Al2O3), TiC and iron powder, and the average diameter is D = 80 μm; the average diameter of the abrasive phase: d1 = 5 μm, d2 = 1.2 μm. Processing gap: 1. 5 mm. Magnetic induction: B = 0.5T. The average grinding pressure is 20~50 kPa. The axial vibration frequency of the workpiece is f = 0 ~ 20 Hz. The axial amplitude of the workpiece is A = 0 ~ 2 mm. The workpiece speed is 1140 r/min. The magnetic induction on the inner surface of the workpiece is 0.3T. The magnetic pole end adopts variable cross-section design, the magnetic pole and coil adopt DT4 electrical iron, the bottom plate uses DT2 electrical iron, the magnetic flux direction magnetic pole, core iron and bottom plate have the cross-sectional areas of 8 cm2, 12.5 cm2, 20cm2 respectively, and the coil adopts φ1mm2 copper enameled wire winding. 6000 åŒ, powered by DC. The maximum output voltage is 25 V and the maximum current output is 3A.
With the continuous development of drilling production, the use conditions of drilling rigs have become more and more diversified, and various types of drilling rigs have appeared accordingly. Factors affecting the type and composition of drilling rigs include drilling method, drilling depth, borehole size and drilling tool size, and drilling area conditions (such as electricity or fuel, transportation, and meteorological conditions).
1. According to drilling method
(1) Impact drilling rigs, such as wire rope impact drilling rigs (drilling rigs), vibration drilling rigs, etc.
(2) Rotary drilling rigs, such as those used in rotary drilling.
(3) Downhole power drilling tools, such as rotary drilling tools, turbo drilling tools, screw drilling tools, electric drilling tools, etc.
2. Divided by drilling depth
(1) Ultra-deep well drilling rig. It adopts a drilling rig with a diameter of 114 mm drill pipe, a nominal drilling depth range of more than 7000 meters, and a maximum hook load of more than 4,500 kN.
(2) Deep well drilling rig. The drill rod is 114 mm in diameter, the nominal drilling depth is 4000-7000 meters or more, and the maximum hook load is 2250-4500 kN or more.
(3) Drilling rigs for medium and deep wells. It adopts a drilling rig with a diameter of 114 mm drill pipe, a nominal drilling depth range of 1500-4000 meters or more, and a maximum hook load of 900-2250 kN or more.
Three, according to power equipment
(1) Diesel Engine-driven drilling rigs, which use diesel engines as power through mechanical transmission or hydraulic transmission.
(2) AC driven drilling rig, suitable for use in oil fields with industrial power grids.
(3) The drilling rig is driven by direct current, and the working unit is driven by a direct current motor.
Fourth, according to the driving mode
(1) Drive alone. Each working machine is driven by generators of different sizes, which are mostly used for electric drive. The transmission is simple and easy to install, but the power utilization rate is low and the total equipment mass is large.
(2) Unified drive. The three working units of drawworks, drilling Pump and turntable are driven by the same power unit. Most drilling rigs use this scheme. The unified drive can also include only one drilling pump, and the other drilling pump is driven separately. The unified drive drilling rig has high power utilization and can be adjusted mutually when the engine fails, but the transmission is complicated, installation and adjustment are troublesome, and the transmission efficiency is low.
(3) Group drive. The combination of power is between individual drive and unified drive. There are two options for three working machines. The power utilization rate of this kind of drilling rig is higher than that of a single drive, and the transmission ratio is simple to drive in a unified manner. Two sets of working machines can also be installed on different heights and scattered sites.
Oil Drilling Rigs,Mine Drilling Rigs,Water Well Drilling Rigs,Exploration Drilling Rigs
Rugao Yaou Import & Export Trade Co., Ltd , https://www.ntyaoumachinery.com